Struktur robot dapat dikelompokkan menjadi beberapa bagian. Menurut warasih (2008), struktur mobile robot dapat dibagi menjadi empat bagian. Bagian tersebut adalah sistem mekanik, sistem pengendali pergerakan, sistem sensor, dan sistem pengetahuan. Menurut Jaya (2016:19), sistem pada robot terdiri dari sensor, sistem kontrol, aktuator, dan mekanik. Sistem pada robot dapat dilihat pada gambar 1.

Sistem Robot
Sistem Kontrol
Sistem kontroler adalah rangkaian prosesor yang berisi sekumpulan prinsip-prinsip algoritma. Menurut Jaya (2016:19) Sistem kontroler adalah rangkaian elektronik yang terdiri dari rangkaian prosesor (CPU, memori, dan komponen interface input dan output). Signal conditioning untuk sensor (analog, dan atau digital), dan driver untuk aktuator. Rangkaian kontroler berfungsi untuk memproses data masukan sesuai dengan program yang telah ditentukan sehingga menghasilkan keluaran berupa keputusan atau instruksi untuk melakukan suatu tindakan.
Sistem Mekanik
Sistem mekanik merupakan bagian yang meliputi bentuk dasar, pergerakan, dan susunan steering sensor. Sistem mekanik robot setidaknya memiliki satu degree of freedom. Degree of freedom (DOF) adalah titik sumbu gerakan mekanik robot. Gerak mekanik robot terdiri dari dua jenis yaitu gerak translasi dan gerak rotasi.
Gerak translasi adalah gerakan suatu benda dimana setiap titik benda menempuh lintasan yang bentuk dan panjangnya sama. Lintasan gerak translasi dapat berbentuk garis lurus maupun garis melengkung. Gerak translasi terdiri dari gerak vertikal dan gerak horizontal. Gerak vertikal yaitu gerak yang arah gerakannya tegak lurus dengan garis horizontal. Sedangkan gerak horizontal adalah gerak yang arah gerakannya sejajar dengan garis horizontal. .
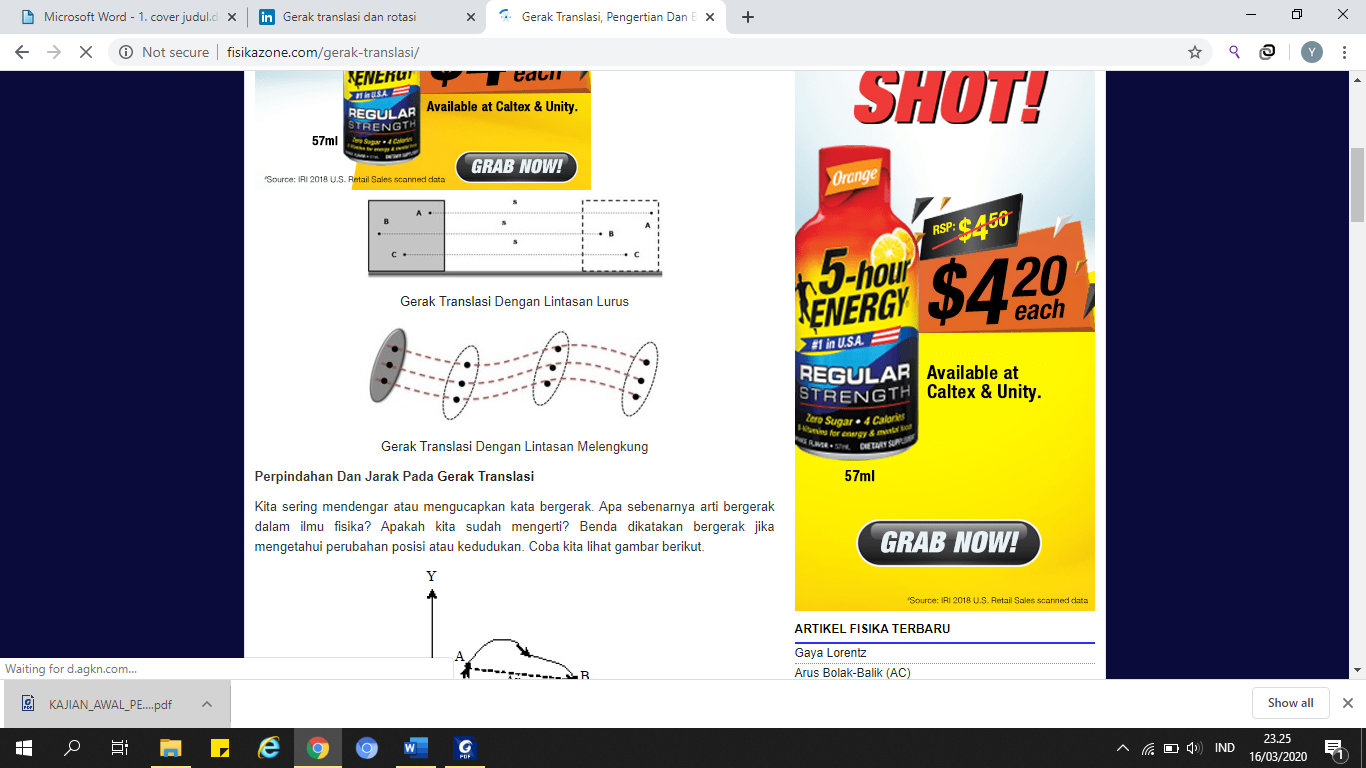
Lintasan Gerak Translasi
Gerak rotasi adalah pergerakan suatu benda dimana setiap titik benda selain titik sumbu putar memiliki lintasan berbentuk lingkaran. Menurut Ilham (2020) gerak rotasi merupakan gerakan memutar suatu benda terhadap titik tertentu. .

Lintasan Gerak Rotasi
Aktuator
No comments:
Post a Comment