Tuesday, December 6, 2022

Prinsip kerja sensor ultrasonik wiring dan pemrograman arduino
Sensor ultrasonik: Pengertian, Prinsip Kerja, Wiring dan Pemrograman pada Arduino

1. Pengertian dan Prinsip Kerja
Sensor ultrasonik adalah sebuah sensor yang berfungsi untuk mengubah besaran fisis (bunyi) menjadi besaran listrik dan sebaliknya. Cara kerja sensor ini didasarkan pada prinsip dari pantulan suatu gelombang suara sehingga dapat dipakai untuk menafsirkan eksistensi (jarak) suatu benda dengan frekuensi tertentu. Disebut sebagai sensor ultrasonik karena sensor ini menggunakan gelombang ultrasonik (bunyi ultrasonik).

Pemancar ultrasonik akan memancarkan gelombang dengan frekuensi 40kHz dengan jeda waktu tertentu.
Kecepatan rambat gelombang bunyi yaitu kisaran 340 m/s.
Sesudah gelombang pantulan mengenai alat penerima, gelombang tersebut akan diolah untuk dihitung jarak benda tersebut.
Rumus jarak benda dapat dihitung dengan rumus sebagai berikut :
S = 340.t/2
S = Jarak
t = Selisih waktu dipancarkan dan waktu diterima gelombang
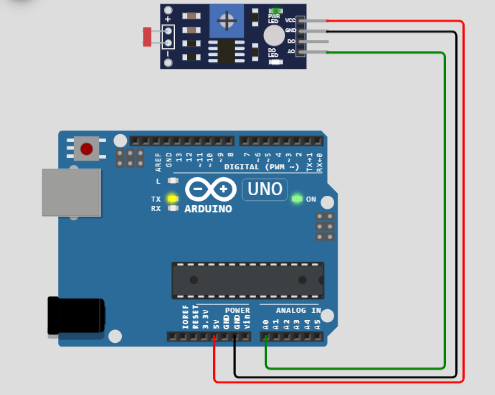
2. Wiring/Pengkabelan Sensor Ultrasonik

3. Pemrograman Arduino
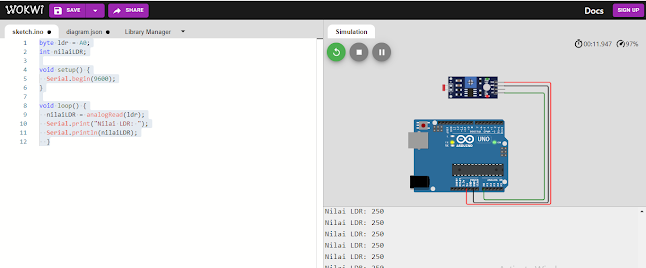
4. Simulasi

Saturday, December 3, 2022
Rangkaian Pneumatik Silinder Kerja Ganda
Rangkaian Pneumatik Silinder Kerja Ganda
Pendahuluan
Kontrol rangkaian pneumatik, berdasarkan aliran udaranya dapat dibedakan menjadi 2 sistem yaitu: Sistem pengontrolan langsung dan sistem pengontrolan tak langsung. Kontrol yang paling sederhana dari silinder kerja tunggal atau kerja ganda adalah kontrol langsung. Kontrol langsung digunakan untuk silinder yang membutuhkan aliran udara sedikit, ukuran katup kontrol kecil dan gaya aktuasinya rendah. Jika katupnya besar, gaya aktuasi yang diperlukan akan terlalu besar untuk dilakukan operasi manual secara langsung. Silinder yang keluar dan masuk dengan cepat atau silinder dengan diameter piston besar memerlukan udara yang banyak. Untuk pengontrolannya harus dipasang sebuah katup kontrol dengan ukuran besar juga. Jika tenaga yang digunakan untuk mengaktifkan katup tidak mungkin dilakukan secara manual karena terlalu besar, maka harus dibuat rangkaian pengontrol tak langsung. Pada sistem ini, sebuah katub kecil digunakan untuk memberikan sinyal untuk mengaktifkan katup kontrol yang lebih besar.
Rangkaian Silinder Kerja Ganda
Prinsip konstruksi silinder kerja ganda adalah sama dengan silinder kerja tunggal, tetapi tidak memiliki pegas pengembali, dan dua lubang saluran dapat dipakai sebagai saluran masukan maupun saluran keluaran secara bergantian. Silinder kerja ganda mempunyai keuntungan yaitu bisa dibebani pada kedua arah gerakan batang pistonnya. Hal ini memungkinkan pemasangan yang lebih fleksibel. Seperti pada silinder kerja tunggal, pada silinder kerja ganda, piston dipasang dengan seal jenis O atau membran.
Jika silinder harus menggerakkan massa yang besar, maka dipasang peredam di akhir langkah untuk mencegah benturan keras dan kerusakan silinder. Proses peredaman dilakukan dengan jalan pada saat piston akan mencapai akhir langkah, peredam piston memotong langsung jalan arus pembuangan udara ke udara bebas. Untuk itu disisakan sedikit sekali penampang pembuangan yang umumnya dapat diatur. Sepanjang bagian terakhir dari jalan langkah, kecapatan masuk dikurangi secara drastis.

Gambar 13.3 Silinder Kerja Ganda
Katup 4/2 atau 5/2 dapat dipakai untuk mengontrol silinder kerja ganda. Katup tombol 4/2 (4/2 way push button valve) mempunyai 4 lubang yaitu dua lubang masukan, lubang keluaran, dan lubang pembuangan. Posisi kontak akan menentukan variasi aliran udara, tombol tekan untuk mengaktifkan dan pegas untuk kembali. Katup tombol 5/2 (5/2 way push button valve) mempunyai 5 lubang yaitu dua lubang masukan, lubang keluaran, dan dua lubang pembuangan.
Katup 4/2 pegas kembali (4/2 way pneumatic valve) mempunyai 5 lubang yaitu dua lubang masukan, lubang keluaran, lubang pembuangan, dan lubang sinyal. Bila lubang sinyal diberi aliran udara maka akan mengaktifkan katup dan sebaliknya bila aliran udara diputus maka katup akan kembali ke posisi awal karena terdorong oleh pegas kembali. Sedangkan katup 5/2 pegas kembali (5/2 way pneumatic valve) mempunyai 6 lubang yaitu dua lubang masukan, lubang keluaran, dua lubang pembuangan, dan lubang sinyal. Bila lubang sinyal diberi aliran udara maka akan mengaktifkan katup dan sebaliknya bila aliran udara diputus maka katup akan kembali ke posisi awal karena terdorong oleh pegas kembali.

Gambar 13.4 Katup 5/2 Pegas Kembali
Gambar Rangkaian Kendali Silinder Kerja Ganda
Komponen yang digunakan
Silinder kerja ganda
Katup kontrol 5/2 NO
Tombol kontrol katup 3/2 NO dengan pegas pengembali

Link Video Youtube : https://www.youtube.com/watch?v=NnKojEZnFkBQ
Macam-macam Header pada Pemrograman C++
Macam-macam Header pada Pemrograman C++
.png)
Macam-macam File Header yang sering digunakan adalah sebagai berikut :
1) stdio.h : Merupakan singkatan dari standar input output header yang digunakan sebagai standar input output operasi yang digunakan oleh bahasa C, akan tetapi bisa juga digunakan dalam bahasa C++. Fungsi-fungsi yang ada didalam stdio.h antara lain sebagai berikut :
printf() : merupakan fungsi keluaran yang digunakan untuk menampilkan informasi/pesan kelayar secara terformat (menentukan tipe data yang akan dikeluarkan).
puts() : merupakan fungsi keluaran yang digunakan untuk menampilkan informasi/pesan yang bertipe data string (tanpa harus melakukan penentuan tipe data terlebih dahulu).
putchar() : merupakan fungsi keluaran yang digunakan untuk menampilkan informasi/pesan yang bertipe data char(tanpa harus melakukan penentuan tipe data terlebih dahulu).
scanf() : merupakan fungsi masukan yang digunakan untuk menginputkan data numerik, karakter, dan string secara terformat (menentukan tipe data yang akan dimasukan).
gets() : merupakan fungsi masukan yang khusus untuk menerima masukan tipe data string (tanpa harus melakukan penentuan tipe data terlebih dahulu).
2) iostream.h : Merupakan singkatan dari input outout stream header yang digunakan sebagai standar input output operasi yang digunakan oleh bahasa C++. Fungsi-fungsi yang ada didalam iostream.h antara lain sebagai berikut :
cout : merupakan fungsi keluaran pada C++ yang menampilkan data dengan tipe data apapun kelayar.
cin : merupakan fungsi masukan pada C++ yang bisa memasukan data berupa numerik dan karakter.
endl : merupakan suatu fungsi yang manipulator yang digunakan untuk melakukan perintah Newline atau pindah baris
3) conio.h : Merupakan File Header yang berfungsi untuk menampilkan hasil antarmuka kepada pengguna. Fungsi -fungsi yang ada didalam conio.h antara lain sebagai berikut :
getch() : merupakan singkatan dari get character and echo yang digunakan untuk menahan (pause) output suatu program dan akan kembali mengeksekusi setelah kita melakukan inputan baik itu tombol enter atau tombol lainnya dan inputan tersebut tidak ditampilkan dalam window.
getche() : secara fungsi sama dengan getch() akan tetapi ketika melakukan inputan, inputan tersebut tampil dalam window.
clrscr() : merupakan singkatan dari clear screen yang digunakan untuk membersihkan layar windows .
4) math.h : Merupakan file header yang berfungsi untuk operasi matematika.Fungsi-fungsi yang ada di math.h antara lain sebagai berikut :
sqrt() : fungsi ini digunakan untuk menghitung akar dari suatu bilangan. Bentuk umum penulisannya adalah sqrt(bilangan); .
pow() : fungsi ini digunakan untuk menghitung hasil dari perpangkatan suatu bilangan . Bentuk umum penulisannya adalah pow(bilangan,pangkat); .
sin(), cos(), tan() : fungsi ini digunakan untuk menghitung nilai sinus, cosinus, dan tangen dari sudut yang dimasukan. Bentuk umum penulisannya adalah sin(bilangan); .
5) stdlib.h : Merupakan file header yang berfungsi untuk operasi pembanding dan operasi konversi. Fungsi-fungsi yang ada di stdlib.h antara lain sebagai berikut :
max() : fungsi ini digunakan untuk menentukan nilai maximum dari 2 bilangan yang diinputkan. Bentuk penulisannya adalah max(bilangan1,bilangan2); .
min() : fungsi ini digunakan untuk menentukan nilai minimum dari 2 bilangan yang diinputkan. Bentuk penulisannya adalah min(bilangan1,bilangan2); .
atof() : fungsi ini digunakan untuk mengkonversi nilai string menjadi bilangan bertipe double. Bentuk umum penulisannya adalah atof(char nama_variabel); .
atoi() : fungi ini digunakan untuk mengkonversi nilai string menjadi bilangan bertipe integer. Bentuk umum penulisannya adalah atoi(char nama_variabel); .
6) string.h : Merupakan file header yang berfungsi untuk melakukan manipulasi string. Fungsi-fungsi yang ada di string.h antara lain sebagai berikut :
strcpy() : fungsi ini digunakan untuk menyalin suatu string ke variabel tujuan. Bentuk umum penulisannya adalah strcpy(variabeltujuan, string); .
strlen() : fungsi ini digunakan untuk menghitung jumlah karakter yang ada dalam suatu string. Bentuk umum penulisannya adalah strlen(string); .
strcmp() : fungsi ini digunakan untuk membandingkan 2 buah string. Bentuk umum penulisannya adalah strcmp(string1,string2); .
strrev() : fungsi ini digunakan untuk membalikan urutan suatu string. Bentuk umum penulisannya adalah strrev (string); .
strlwr() : fungsi ini digunakan untuk mengubah semua huruf menjadi huruf kecil. Bentuk umum penulisannya adalah strlwr(sterng); .
strupr() : fungsi ini digunakan untuk mengubah semua huruf menjadi huruf kapital. Bentuk umum penulisannya adalah strupr(string); .
strcat() : fungsi ini digunakan untuk menggabungkan 2 buah string, untuk menggunakan fungsi ini juga harus menambahkan file header ctype.h. Bentuk umum penulisannya adalah strcat(variabeltujuan, string); .
Tutorial Aplikasi Pemrograman C++ di Android
Tutorial Aplikasi Pemrograman C++ di Android
Dcoder merupakan sebuah aplikasi yang digunakan untuk
memrogram dengan menggunakan berbagai macam jenis
bahasa pemrograman.
Aplikasi ini dapat digunakan untuk:
Menulis Naskah Program.
Mengkompilasi Program ( Compile )
Melakukan Pengujian Program ( Debugging )
Mengaitkan Object dan Library ke Program ( Linking )
Menjalankan Program ( Running )
Berikut ini adalah tampilan halaman pemrograman aplikasi Dcoder:

Gambar Tampilan Dcoder
Aplikasi Dcoder dapat didownload melalui playstore.

Gambar Aplikasi Dcoder pada Playstore
Berikut ini langkah-langkah membuat program di smartphone
Buka aplikasi Dcoder. Klik Start Coding

Klik Create Code

Pilih C++. Klik Next

Beri nama file/program. Klik create file

Tampilan awal aplikasi. Klok Tombol Play untuk run program.
Gambar tampilan saat di run/compile

Untuk membuat enter perlu ditambah <<endl;
