Klasifikasi Robot Industri
Departemen industri Universitas Lousiana memudahkan pengelompokan robot berdasarkan enam kategori yaitu:
1. Geometri lengan (arm geometry): berbentuk persegi, silinder, bola, dan persendian.
2. Derajat kebebasan (degree of freedom): skala angka yang menyatakan semakin tinggi nilai kebebasan menunjukkan fleksibilitas gerak semakin bebas.
3. Sumber tenaga: tenaga listrik, tenaga hidrolik, tenaga pneumatic
4. Alat dan jenis gerak: robot statis, robot beroda, robot berkaki
5. Path control: serangkaian gerak terbatas, perpindahan titik,
sekuens gerak berkelanjutan, arah gerak terkontrol.
6. Skala kecerdasan: terkontrol dan otonom.
Organisasi lainnya juga mendefinisikan sistem klasifikasi untuk jenis robot yang lain. Japanese Industrial Robot Association (JIRA) mendefinisikan enam kelas robot industri yaitu:
1. Perangkat penanganan manual: robot ini memiliki derajat kebebasan yang tinggi, namun semua aksi yang dilakukan harus dikontrol operator.
2. Rangkaian pekerjaan tetap: robot ini bertugas melakukan aksi terbatas yang ditentukan tanpa memerlukan bantuan operator, namun aksi yang dilakukan tidak dapat dirubah.
3. Rangkaian pekerjaan terprogram: Robot ini memiliki kemiripan dengan kelas 2, kecuali aksi yang ditentukan dapat deprogram untuk tugas baru.
4. Playback robot: Robot ini pertama dilatih untuk melakukan rangkaian operasi oleh operator, selanjutnya robot dapat melakukan aksi yang sama berulang-ulang.
5. Robot kontrol numerik: Robot bekerja melalui suatu rangkaian operasi melalui data numerik yang diterimanya.
6. Robot cerdas: Robot yang dapat membaca informasi dari lingkungan, dan merespon sesuai dengan keadaan dalam rangka menunaikan tugas yang ditentukan. Robotic institute of America mengklasifikasikan robot industry berdasarkan kelas yang mirip namun tidak menganggap kelas 1 dan 2 sebagai robot.
Klasifikasi Robot Berdasarkan Kemampuan Gerak
Berdasarkan kemampuan geraknya robot dapat diklasifikasikan menjadi dua kelas yaitu robot statis dan robot bergerak. Penjelasan mengenai kedua kelas tersebut adalah sebagai berikut.
Robot Statis
Robot jenis ini letaknya menetap dan tidak dapat berpindah ke suatu lokasi tertentu, tanpa bantuan manusia. Walaupun melakukan gerakan, hanya beberapa bagian robot itu saja yang melakukannya, contohnya seperti lengan robot. Robot ini kebanyakan digunakan untuk keperluan pabrik dan industri, seperti industri otomotif dan industri makanan. Robot ini mencakup:
Robot Arm: robot berbentuk lengan.

Robot lengan
b. Numerical Control Machine Tools : robot berbentuk komputer yang dioperasikan menggunakan perintah yang diprogram dan berfungsi untuk mengontrol pergerakan mesin tertentu secara otomatis

Numerical Control Machine
Robot Bergerak
Disebut juga sebagai mobile robot, dan seringkali dilengkapi dengan kemampuan untuk bergerak otonom. Robot ini memiliki kemampuan untuk berpidah dari satu tempat ke tempat yang lain, perpindahan tersebut direncanakan berdasarkan motion planning yang ditentukan berdasarkan pertimbangan objektif tertentu misalnya menghindari rintangan atau mencari jarak terdekat. Karena keperluannya untuk bergerak, robot bergerak umumnya dilengkapi sensor untuk mendeteksi halangan, sensor dukungan gerak seperti accellerometer, sensor deteksi keseimbangan seperti gyroscope. Robot juga harus memiliki kemampuan melacak posisi saat ini dan posisi yang dituju sehingga tidak jarang dilengkapi dengan GPS. Sebagai kawanan, robot bergerak memerlukan mekanisme komunikasi sesamanya sehingga memerlukan pemasangan wireless sensor network. Berdasarkan alat gerak yang dipergunakan, robot bergerak dapat diklasifikasikan menjadi robot beroda dan robot berkaki
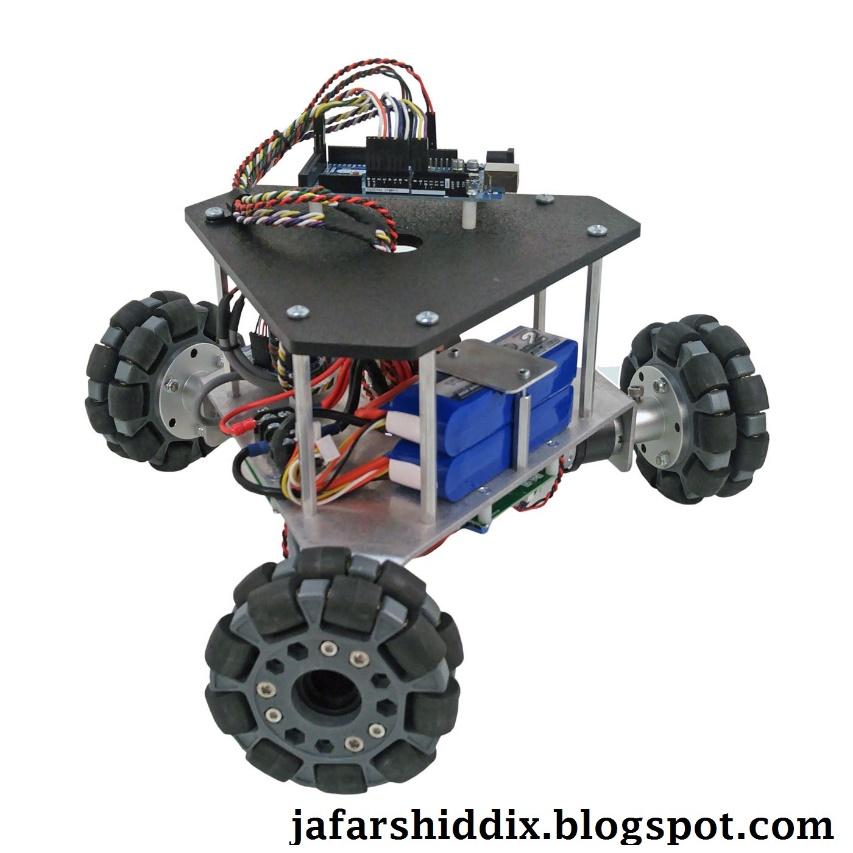
Robot Beroda

Robot Beroda
Robot beroda merupakan robot yang dapat berpindah menggunakan roda bermotor untuk bergerak. Dibandingkan dengan robot jenis lain robot ini lebih mudah dibangun, dikontrol, dan digunakan pada bidang datar. Namun demikian, robot jenis ini kurang sesuai untuk bidang kasar seperti bebatuan ataupun bidang yang memiliki halangan, dan juga bidang yang kemiringannya terlalu curam. Robot beroda dapat diklasifikasikan berdasarkan jenis roda dan jumlah rodanya. Kedua hal tersebut akan dijelaskan pada bagian selanjutnya.
Berdasarkan jenis rodanya, robot beroda dapat diklasifikasikan menjadi tiga kelas. Masing masing kelas memiliki perbedaan dalam hal kinematika sehingga pemilihan jenis roda akan mempengaruhi kemampuan kinematika robot secara keseluruhan. Pemilihan jenis roda pada robot berhubungan erat dengan susunan rancangan roda, dan juga geometri roda. Jenis roda pertama adalah roda biasa yang memiliki dua derajat kebebasan dan dapat bergerak maju atau mundur. Jenis kedua adalah roda omni. Pada roda jenis ini terdiri dari roda utama yang
emiliki bentuk fisik mirip dengan roda biasa, namun pada perimeter luar roda utama terpasang sub roda-roda lain yang memiliki axis rotasi berbeda dengan roda utama dan berukuran lebih kecil. Omni wheels memiliki nilai tiga derajat kebebasan. Jenis terakhir adalah roda berbentuk bola yang juga memiliki nilai derajat kebebasan sama seperti omni wheels, namun lebih bebas bergerak. Hal ini terjadi karena pada omni wheels terdapat sub roda yang mengalami gaya hambat akibat tekanan berat dari roda utama. Bentuk fisik dari ketiga jenis roda tersebut dapat dilihat pada gambar berikut ini.

Roda Biasa
Robot Roda Omni

Roda Bola untuk Robot
Selain pemilihan jenis roda, perancang robot juga perlu memperhatikan konfigurasi roda yang akan dipasang. Hal ini mencakup jumlah roda yang akan dipasang dan sistem kemudi yang akan dipakai. Robot beroda dapat memiliki jumlah roda minimal satu dan tidak memiliki batasan maksimal. Meskipun demikian, jumlah minimal roda untuk mencapai kesetimbangan statik dan dinamik adalah tiga.
Robot Berkaki

Robot Berkaki
Sistem beroda telah banyak diadaptasi pada robot sebagai mekanisme gerak yang memiliki tingkat efisiensi tinggi pada medan rata. Di sisi lain, robot berkaki belum banyak dikembangkan karena masalah kompleksitas yang tinggi. Meskipun demikian, sistem berkaki memiliki keunggulan dalam menjelajahi berbagai jenis medan yang sulit dijelajahi robot beroda ataupun robot berantai, misalnya kondisi tangga. Tidak jarang pengembang robot menggunakan lokomotif hybrid dari roda dan kaki sebagai lokomotif alternatif untuk memaksimalkan potensi gerak dari kedua lokomotif tersebut. Perusahaan General Electric pada 1968 merupakan yang pertama dalam mengembangkan mesin berkaki empat yang telah terkoordinasikan dengan baik, dan memperhitungkan event gait. Setiap kakinya telah memiliki tiga DOF untuk melintasi medan yang kompleks. Kelemahannya robot ini masih memerlukan control manual, dengan total 12 derajat kebebasan yang menyebabkan robot ini sulit dikontrol oleh operator. Robot pertama berkaki, Phoney Poney dikembangkan oleh McGhee dan Frank pada tahun yang sama dan telah mengotomasi kontrol menggunakan komputer yang dihubungkan ke aktuator elektrik. Namun demikian, robot ini hanya dapat berjalan lurus dan setiap kakinya hanya memiliki nilai DOF dua. Periode tahun 1950-1970 dianggap sebagai kegagalan dalam mengaplikasikan lokomosi berkaki.
Klasifikasi Robot Bergerak Berdasarkan Medan Jelajah
Berdasarkan medan yang dijelajahi, robot bergerak dapat diklasifikasikan sebagai berikut.
Robot Penjelajah Darat
Robot jenis ini mencakup segala jenis robot yang bergerak di daratan. Karena sifatnya yang relatif mudah dibuat, hamper sebagian besar robot bergerak termasuk dalam kategori ini.
2. Robot Penjelajah Air
Robot Air
Robot jenis ini mencakup segala robot yang bergerak di permukaan air, maupun di bawah permukaan air. Robot air biasanya digunakan untuk keperluan militer, mengeksplorasi keadaan bawah laut, serta untuk industri seperti pengeboran minyak dan gas lepas pantai.
3. Robot Penjelajah Udara

Robot Terbang
Robot jenis ini mencakup segala robot yang terbang di udara, baik menggunakan baling-baling, sayap, maupun dorongan roket . Robot ini paling banyak digunakan untuk keperluan militer, seperti pesawat tempur ataupun pesawat mata-mata. Selain itu robot ini juga sering digunakan untuk melakukan observasi suatu lokasi, melakukan pemetaan suatu daerah, dan melakukan pencarian suatu objek dari udara. Robot penjelajah udara lebih mahal dan lebih sulit untuk dibuat karena harus memperhatikan desain aerodinamik. Namun demikian robot penjelajah udara memiliki keunggulan dibandingkan robot darat, dimana robot penjelajah udara lebih mudah dalam melakukan perpindahan, dan dapat berpindah dengan kecepatan yang lebih cepat.